4月27日下午,山东第一医科大学(山东省医学科学院)医学人工智能与大数据学院邀请到上海交通大学医疗机器人研究院常务副院长陈卫东教授做客智能医学讲堂,带来专题报告《移动辅助机器人感知与控制技术研究进展》。

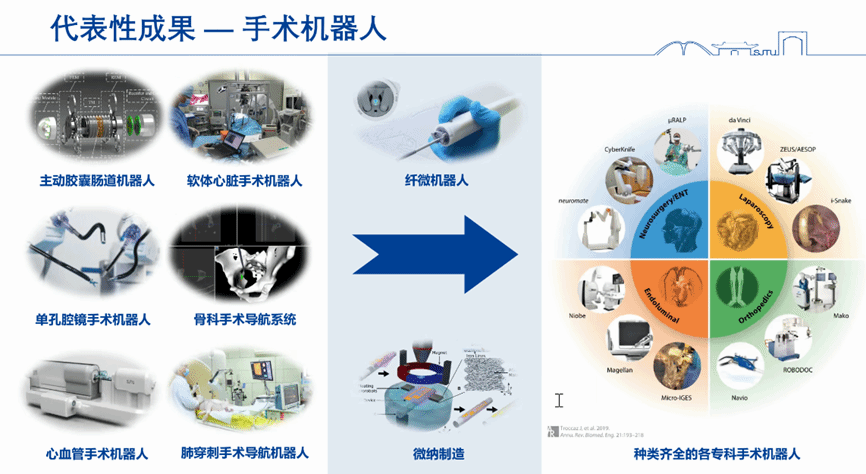
陈卫东教授首先介绍了国内康复市场的现状,结合国家政策与当前市场的迫切需求展望了康复市场的巨大潜力。随后,陈卫东教授分享了上海交通大学医疗机器人研究院的主要研究内容,介绍了研究院的代表性成果——手术机器人、交龙智能轮椅、全自动智能转运机器人等具有革命性推进力量的技术研发进展。
陈卫东教授在报告中重点讲述了交龙智能轮椅的技术难点及解决方案。智能轮椅的工作环境复杂,人流量大,周围环境物体变动较大,如何快速、精准、智能地规划合理的路径以及躲避障碍是在研究中需要重点解决的问题。交龙智能轮椅集成了IMU、激光雷达、景深摄像头等智能设备,并开发了融合定位算法,雷达实时扫描避障,鲁棒的路径规划算法,运用多传感器数据融合,进行粒子滤波定位,实时对地图进行更新。并进一步开发脑机接口,尝试运用脑电信号对轮椅进行控制,运用共享控制的方法,让脑电检测、分类、处理更加快速、准确、有效。
报告最后,与会的老师和同学与陈卫东教授进行了热烈的讨论和良好的互动。
报告人简介
陈卫东于哈尔滨工业大学获得学士、硕士和博士学位,1996年加入上海交通大学,现任上海交通大学电子信息与电气工程学院自动化系教授,上海交通大学医疗机器人研究院常务副院长。先后主持多项国家重点研发计划和国家自然科学基金联合基金重点项目和课题,获上海市教学成果奖和上海市科技进步奖。发表论文300余篇,获IEEE ICRA大会服务机器人最佳论文奖等多项国际会议论文奖,授权发明专利50余项。目前担任上海市微型电脑应用学会理事长,国际Intelligent Autonomous Systems Society理事,日本电气通信大学脑科学生命支持研究中心客座教授。主要研究领域包括机器人感知与控制、医疗机器人等。

